本文探討研究了在SolidWorks下的弧焊機器人虛擬示教系統相關內容。
1機器人示教編程方法的發展
機器人示教編程方式有兩種:在線示教、離線示教。在線示教即手把手示教,簡單方便,適用于大批量生產,所完成的任務簡單單一,但是隨著機器人適用任務的擴展和所完成任務的復雜程度的提高,在中小批量的生產中,用在線示教編程很難實現}z7。離線示教即脫離實際作業環境生成示教數據,間接地對機器人進行示教,對操作人員要求較高,使用也不太方便,尤其是在對機器人作業任務的描述上不能簡單直接。虛擬示教編程充分利用上述兩種示教方法的優點,借助于虛擬現實系統中的人機交互裝置操作計算機屏幕上的虛擬機器人動作,經仿真通過后,記錄示教點位姿、動作指令,將生成作業文件下載到機器人控制器,完成機器人的示教。
2弧焊機器人虛擬示教系統設計
該弧焊機器人示教系統主要分為四大部分,即實體建模、模型位姿調整、控制參數輸人輸出焊接機器人仿真示教等。
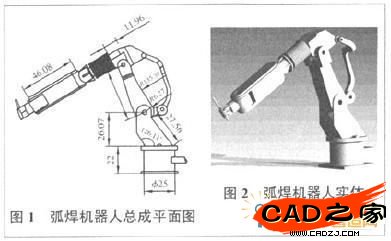
2.1弧焊機器人實體建模
首先根據實際幾何參數,利用SolidWorks的實體造型功能構建出弧焊機器人各零件、待焊工件和工作空間的三維模型,如圖1、圖2所示。
2.2控制部分程序設計
2.2.1 Weld控制界面DLL程序設計
本文應用Visual C++開發虛擬示教系統,使用Visual C++編譯出來的DLL (Dynamic Link Library)作為SolidWorks的插件將程序集成到SolidWorks中。Visual C++的工程向導Swizard.swx給出了Solid Works的基本開發模板,使用前須先將Swizard.swx復制Visual C++安裝目錄CommonlMSDev98Template文件夾下。
用向導創建一個名稱為"Weld"的新DLL,插人對話框資源文件,使用編輯工具條在對話框上添加文本框、編輯框等控件,在對話框上點擊右鍵選擇類向導,為對話框創建一個新的類,然后為對話框的各個控件添加成員變量和成員函數并進行編輯,Weld控制界面如圖3所示(程序代碼從略)。

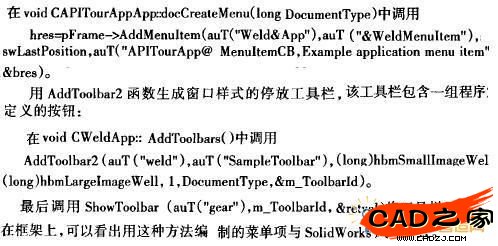
2.2.2對話框與SolidWorks的鏈接
用AddMenultem函數為當前下拉菜單添加菜單項或分割條
2.3逮擬環境下弧焊機器人的運動學規劃
2.3.1弧焊機器人路徑規劃
焊接機器人路徑規劃即對于某一指定焊縫規劃出無碰撞的焊接機器人焊槍運動路徑,對于弧焊機器人而言,即無碰路徑規劃。主要包括焊槍位置和焊槍姿態兩個方面。在弧焊過程中,焊縫是焊槍位置的約束條件,避免碰撞是焊槍姿態最優化的約束條件,由此可以得出焊槍姿態最優化問題的數學模型:
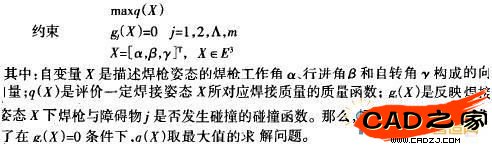
2.3.2弧焊機器人軌跡規劃
焊接機器人軌跡規劃即焊接路徑轉換成焊接機器人各個關節的空間坐標,形成運動軌跡。其主要目標是使機器人避開關節極限和機器人退化區等運動限制,并保持機器人的靈活性與平穩性。本文中焊接機器人與變位機配合使用,將焊接機器人與變位機作為一個整體,認為是一個冗余度機器人系統,將軌跡規劃問題表示為多性能指標融合控制問題,包括焊槍姿態函數、避免奇異空間函數、焊槍運動平穩函數和避免關節超限函數。其多性能指標融合軌跡規劃的數學模型:

焊接機器人路徑規劃根據焊接參數提出的工藝要求.規劃出無碰的焊槍位置和姿態。焊接機器人的軌跡規劃針對具體的機器人運動限制.實現路徑規劃提出的焊槍位姿要求。
2.4弧焊機器人仿真示教
SolidWorks的Animator插件可以設定運動機構零部件的關鍵點。所謂"關鍵點"( Key Frame ),就是零部件的某個特定狀態;當零部件的空間位置隨時間發生變化時,"關鍵點"就是零部件運動前后的兩個狀態。
仿真示教時,首先粗定弧焊機器人的關鍵點,在Animator下設定的起始位置和終止位置后。如圖4(a),(b),拖動時間滑桿設置運動時間,各零部件的運動類型(驅動和從動)由系統根據幾何約束自動設定;然后在Weld控制界面下,根據實際情況,對弧焊機器人的位姿參數進行調節,如圖4(c),使滿足工藝條件;再進行模擬仿真,調整參數,排除運動過程中的奇異點和碰撞干涉點,如圖4(d)。整個過程是仿真示教、參數調節一再示教得到最優結果。

在SolidWorks環境下,可以將焊接機器人各個構件的運動參數曲線輸出,以旋轉臺為例,圖5(a),(b)為旋轉臺在示教過程中的角度與速度變化曲線。

3結論
初步建立了弧焊機器人虛擬示教系統的SolidWorks三維實體建模、模型位姿調正、控制參數輸人輸出、焊接機器人仿真示教等四個模塊。給用戶提供具有良好臨場感的三維虛擬環境和友好的人機交互界面.有助于提高弧焊機器人的工作效率和自動化程度。